福島第一1号機、燃料デブリ取り出しの調査に向け水中ロボ投入
10 Feb 2022
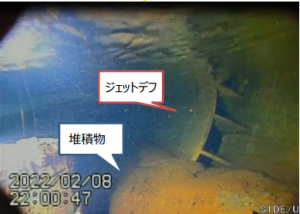
水中ROVがとらえた1号機PCV内部映像(東京電力発表資料より引用)
東京電力は2月8日、福島第一原子力発電所1号機の原子炉格納容器(PCV)内に潜水機能付ボート型ロボット(水中ROV)を投入。今後の燃料デブリ取り出しに向けたPCV内部調査の事前対策として、ガイドリング(ケーブル絡まりを防止する通過用の輪っか)の取り付けを行うもので、9日までにPCV底部に「堆積物らしきもの」があることが確認された。同社では水中ROVによる映像を公開している。〈東京電力発表資料は こちら〉
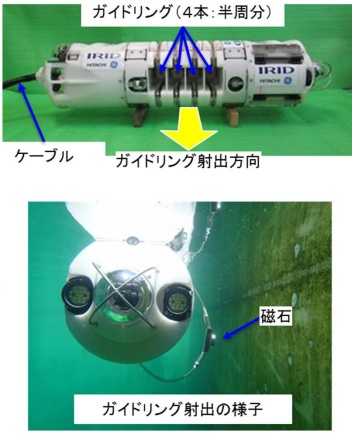
ROV-Aによるガイドリング取り付け、磁石で固定され60kgの耐荷重(写真はモックアップ試験、東京電力発表資料より引用)
1号機に順次投入される水中ROVは作業・調査の用途に応じ6種類あり、今回投入したのはガイドリング取り付け用の「ROV-A」(直径25cm、長さ111cm)だ。当初、1月中旬が予定されていたが、線量データが正確に表示されないなどの不具合が生じたため、延期となっていた。「ROV-A」は、直径約3mのジェットデフレクターと呼ばれる円盤状の鋼材4か所へのガイドリング設置を完了。10日に装置本体の吊り上げ・回収に入る。今後、各水中ROVにより、ペデスタル(原子炉圧力容器下部)内外の詳細目視調査、堆積物の厚さ測定、核種分析、サンプリングなどを順次実施予定。
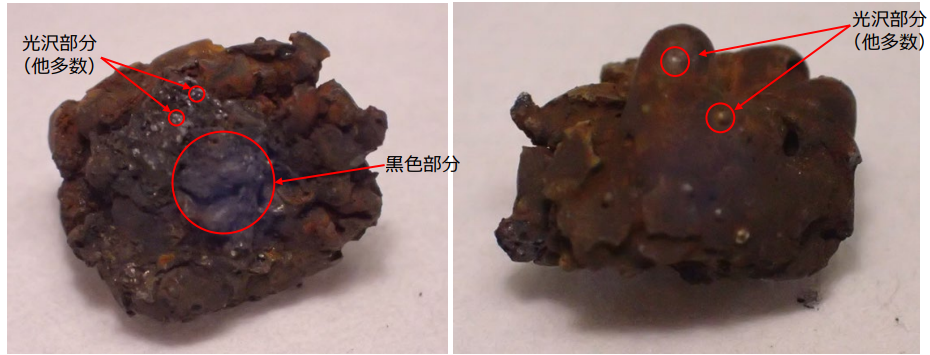
1号機のPCV内部調査は2017年にも実施されており、自走式調査装置の投入により、「ペデスタル開口部床面近傍で高さ約1m、幅約1.5mの堆積物が存在」との推定が得られている。その知見を踏まえ、続く水中ロボット投入では、ペデスタル内外の調査を行い、堆積物の回収手段・設備の検討など、工事計画の具体化に向けた情報収集を図る。