原子力学会、福島第一の燃料デブリ取り出しに関しシンポ
22 Jul 2022
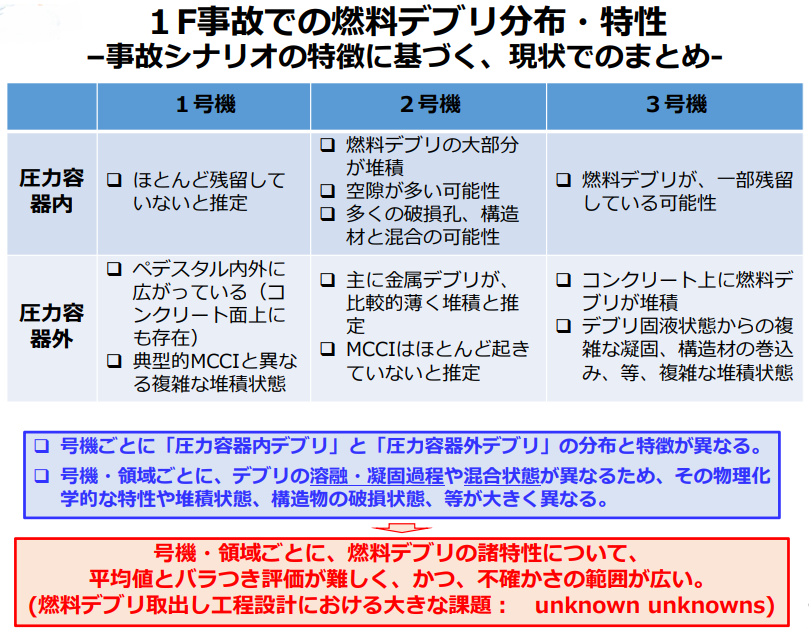
原子力機構・倉田氏による福島第一の号機ごとの燃料デブリ分布・特性分析(MCCI:溶融した燃料デブリが短時間で格納容器底部コンクリートのピットに溶落してコンクリートを溶融侵食する現象、同氏発表資料より引用)
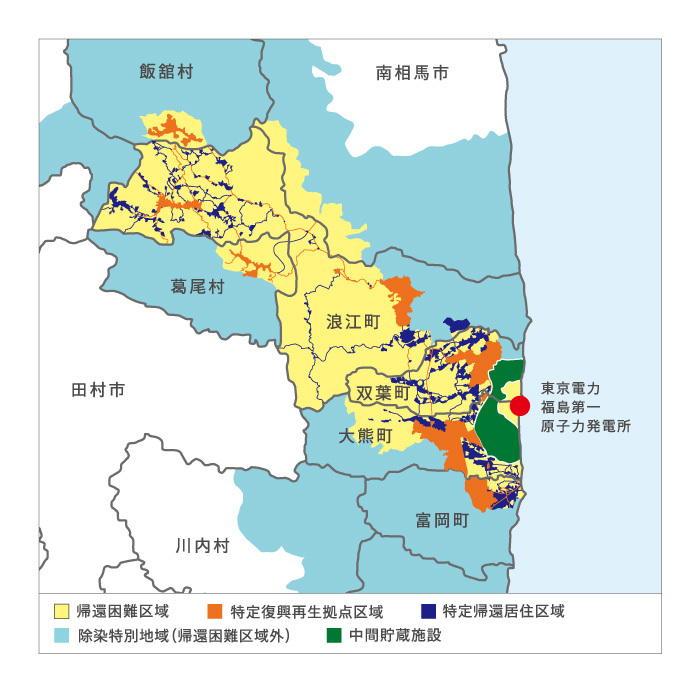
福島第一原子力発電所の廃炉に伴う燃料デブリ取り出しの課題について考えるシンポジウムが6月25日、オンラインにて行われた。日本原子力学会福島第一原子力発電所廃炉検討委員会(委員長=宮野廣氏〈元東芝〉)の主催によるもので、「デブリの生成過程と取扱い」、「燃料デブリの取り出しとロボット技術」をテーマにパネルディスカッション。事故発生から11年を経過した現在、原子力問題について長く取材を続けてきた報道関係者にもコメントを求めながら、今後の長期にわたる廃炉活動の一助とすべく議論を深めた。
「デブリの生成過程と取扱い」に関して、倉田正輝氏(日本原子力研究開発機構廃炉環境国際共同研究センター長)が論点を提示。同氏は、一般に「メルトダウン」と呼ばれる原子炉圧力容器内の燃料溶融・破損のメカニズムについて、米国TMI事故との違いをあげながら説明。福島第一原子力発電所事故では、固体と液体が混合状態で“どろっ、ぐずっ”と崩落する「ドレナージ型」の傾向が2号機、3号機、1号機の順に強いとの分析結果を示し、「この現象が燃料デブリの分布や特性に非常に大きく影響している」ことを繰り返し強調した。こうした号機・領域ごとに多様で複雑な分布・堆積状態を踏まえ、「燃料デブリのデータベースの効率的な整備が大きな課題」とした上で、「分析の基準物質が存在しない」、「不確かさの評価には膨大な分析が必要」という燃料デブリの“unknown”を解決する必要性を指摘。さらに、倉田氏は、「どこまで“unknown”であれば安全裕度を十分にとった工程設計ができるか。そこからどのように“unknown”を減らしていけば工程を合理化できるのかが工学的な課題だ」と述べ、議論に先鞭をつけた。
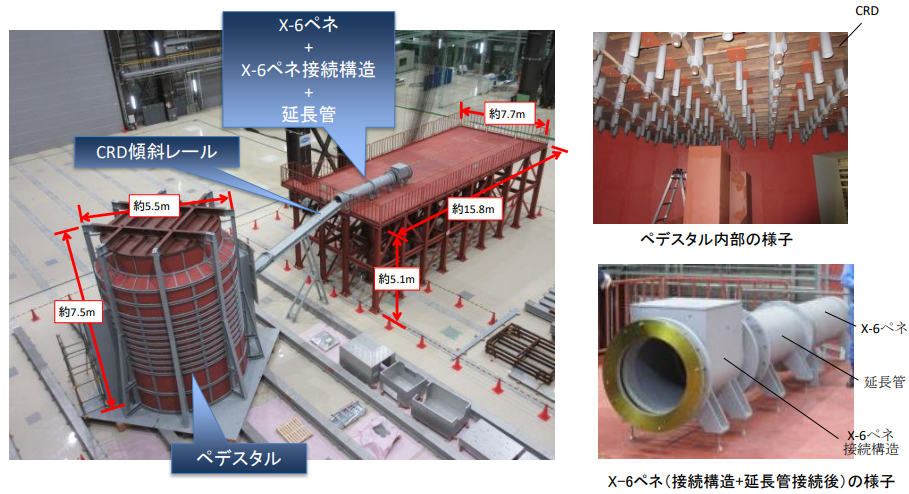
ロボットアームの性能試験を行う原子力機構楢葉センターのモックアップ設備(ペデスタル:圧力容器下部の土台、CRD:制御棒駆動機構、IRID発表資料より引用)
「燃料デブリの取り出しとロボット技術」に関しては、奥住直明氏(国際廃炉研究開発機構〈IRID〉開発計画部長)がIRIDの取組状況を説明。現在、燃料デブリ取り出しの初号機となる2号機での試験的取り出しに向けて、ロボットアームのモックアップ試験・操作訓練が原子力機構の楢葉遠隔技術開発センターで行われている。同氏は、燃料デブリ取り出し時の重要項目として、
(1)閉じ込め(作業時に発生するダストを環境に放出させない)
(2)作業員被ばくの低減
(3)臨界防止
(4)火災・爆発の防止
(5)冷却
――をあげた。
これを受け、パネリストからは、鈴木俊一氏(東京大学大学院工学系研究科特任教授)が、将来予測されるリスクを見据え廃棄物管理も含めた廃炉工程全体を俯瞰する重要性を強調。土木分野で用いられる遠隔技術の有効性を述べるとともに、「安全を担保した上で、時間軸を意識した工法選択をすべき」とした。
ロボット工学の立場から大隅久氏(中央大学理工学部教授)は、「どんな機械でも初めて作ったものがすぐに使えたことはない」と、ロボット開発においてトライアル・アンド・エラーを繰り返してきた経緯を振り返る一方で、過酷な環境下で働く廃炉に用いるロボットの特徴から、「徹底したモックアップ試験やオペレーター訓練を通じ、『想定外』を潰す努力が必要」と強調。
廃炉検討委員会のもとで、ロボット分科会の主査を務める吉見卓氏(芝浦工業大学工学部教授)は、「作業の進展によって現場の作業環境も変わっていく」と指摘。作業段階に応じたモックアップ訓練やヒューマンエラーを防ぐシステム導入の必要性などを述べた。
ロボットの設計・運用に関し、報道関係者からのコメントとして滝順一氏(日本経済新聞編集委員)がAI技術の活用を提案。核融合炉のメンテナンス用ロボットの開発経験を持つ吉見氏は、原子炉の円形構造に着目し、自動車搭載のアラウンドビューモニターの応用による遠隔操作効率化の可能性に言及。建設ロボットに詳しい大隅氏は、廃炉作業における工法に関し、ゼネコンの実例にも触れながら、ロボットを利用しやすい環境構築や工法全体の最適化などを図る「サイト全体のロボット化」の考えを提唱した。
廃炉で培われた技術・経験の社会展開に向け、鈴木氏が若手へのモチベーション喚起も見据え広く発信していく「廃炉の魅(み)える化」を主張。福島の復興を巡る諸問題に関して継続的に取材を行ってきた吉野実氏(テレビ朝日報道局)は、他県の中小企業でも廃炉事業への参画機運が高まっていることを紹介した。