東芝・IRID、福島第一格納容器内部調査に向け小型ロボット開発
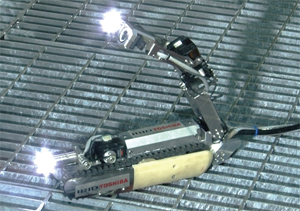 東芝と国際廃炉技術研究開発機構(IRID)は6月30日、福島第一原子力発電所2号機の原子炉格納容器内の状況調査のため、新たに開発した小型ロボット(=写真)を報道関係者に公開した。7月にも操作訓練を実施し8月中を目途に現場投入される計画だ。
東芝と国際廃炉技術研究開発機構(IRID)は6月30日、福島第一原子力発電所2号機の原子炉格納容器内の状況調査のため、新たに開発した小型ロボット(=写真)を報道関係者に公開した。7月にも操作訓練を実施し8月中を目途に現場投入される計画だ。
同機では、燃料デブリの取り出し手順や工法を検討するため、燃料デブリの分布状況を把握することが求められており、新開発したロボットを活用し、原子炉格納容器内の落下物や損傷の有無、アクセスルートの状況などを確認する。このほど改訂された福島第一廃止措置の中長期ロードマップでは、2018年度上半期に初号機燃料デブリ取出し方法を確定することを目指している。
新開発したロボットは、2台のカメラやLEDライト、放射線量計、温度計を搭載した長さ約54センチメートル、幅約9センチメートル、高さ約9センチメートル、重量約5キログラムの小型ロボットで、有線ケーブルで遠隔操作し、直径約10センチメートル程度のパイプを通り抜け格納容器内に進入する。ロボット後方にLEDライトとカメラを搭載しており、格納容器の中心付近では後方をサソリの尾のように反り上がらせ、LEDライトで周辺を照らすことで広範囲の撮影が行えるほか、走行中に倒れても復帰可能な機構も備えている。
現在、福島第一2号機では、原子炉格納容器内部調査に向けて、調査装置を投入する格納容器貫通部(X-6ペネ)の前に設置された遮へいブロックを遠隔操作で除去する作業が進められているところだ。