日立GEとIRID、福島第一1号機PCV内部調査に向け新ロボット開発
日立GEニュークリア・エナジーと国際廃炉研究開発機構(IRID)は2月3日、福島第一原子力発電所1号機の原子炉格納容器(PCV)内部調査に向け、新たに3次元計測が可能な線量計や水中カメラを搭載したロボット「PMORPH」(ピーモルフ、=写真〈IRID提供〉)を開発したと発表した。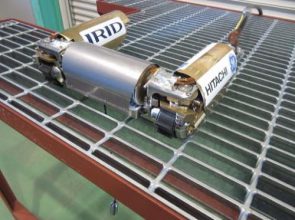
燃料デブリ取り出しに向けて、福島第一1号機では、2015年4月に、日立GEとIRIDが開発した遠隔操作で形状を線型からコの字型に屈曲できる調査ロボットを、直径10cm程度パイプを通してPCV内に投入し、1階グレーチング(金属製の格子状スノコ)上の調査(B1調査)を行っている。同調査では、1台目のロボットが途中で床面の隙間に挟まって動けなくなるというトラブルが発生した。
今回、開発された「PMORPH」は、これに続くPCV内部の地下階調査(B2調査)に用いられるもので、B1調査のロボットと同様に、パイプ内を走行する際は線型で、グレーチング上では安定的に走行できるよう形状をコの字型に屈曲させることができ、耐放射線性が高いカメラとLED、線量計を一体にしたセンサユニットで、目視と測定の両方から燃料デブリの広がり状態を判別する。本体寸法は、ガイドパイプ走行時で長さ699mm×幅72mm×高さ93mm、重量10kgと、B1調査で用いたロボットより一回り大きく、計5台のカメラの他、センサユニットを繰り返し昇降させるためのウインチを搭載している。
今後、「PMORPH」は、2016年度内の現場投入に向け、PCV内部を模擬した試験体を用いて操作訓練や動作確認を行う。