三菱重工・IRIDがロボットアーム公開、福島第一燃料デブリ取り出しに向け

全長7.1mのロボットアーム(三菱重工神戸造船所にて)
三菱重工業と国際廃炉研究開発機構(IRID)は4月24日、福島第一原子力発電所の燃料デブリ取り出しに向けた技術開発として試作したロボットアームのデモンストレーションを報道関係者に公開した。
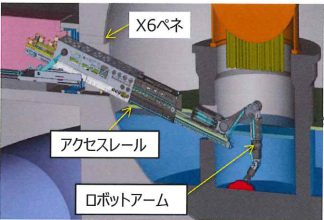
気中・横アクセス工法のイメージ(IRID資料より引用)
廃炉の中長期ロードマップでは、燃料デブリ取り出しについて「気中・横アクセス工法」に軸足を置いて今後の取組を進めるとされている。三菱重工業とIRIDでは、その一環として、燃料デブリを加工・把持するロボットアームを原子炉格納容器の側面からアクセスレールを介しペデスタル(原子炉圧力容器下部)に導入することを想定した動作性確認を2月に実施した。

遠隔操作でアームの先端は精度5mmで位置決めできる
ロボットアーム、アクセスレールとも、2016年度までにそれぞれ単体での機能試験が完了しており、このほど三菱重工業神戸造船所のモックアップで、両者を組み合わせた「ロボットアーム/アクセスレール方式」として、ロボットアームの展開、燃料デブリの加工・把持、ユニット缶への回収・移送といった模擬動作を披露した。

IRIDの奥住直明開発計画部部長、「ステップ・バイ・ステップで燃料デブリの取り出しが進む中、今回の大型装置で効率が上がる」と期待
2021年内の燃料デブリ取り出し開始を目指し、現在各号機で原子炉格納容器の内部調査が進められているが、今回開発に当たった三菱重工業の技術者は、「これはあくまで要素技術。現場に導入できるまでには、さらに完成度を上げていく必要がある」と話している。例えば、ロボットアームは直径6cm程度のコアボーリングを想定し先端負荷重2トンとして製作されているが、燃料デブリの性状がまだ解明できていないことから、搭載するツールの仕様・機能や耐放射線性能なども今後の技術課題である。